


KF193机器人
防爆涂装机器人
拥有φ40的中空内径和外形紧凑的手腕,是一款线缆内置、动作范围小的防爆喷涂机器人。对节省空间做出了杰出的贡献。
KF193概述:
负载12 kg
水平伸展距离1,973 mm
应用:涂装
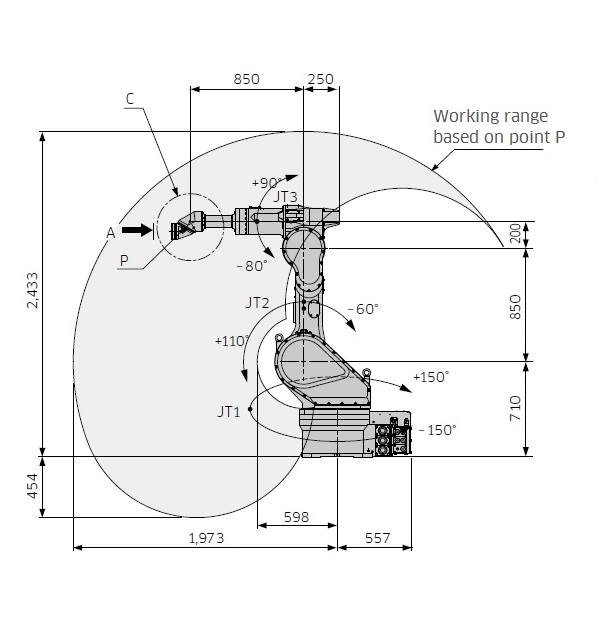
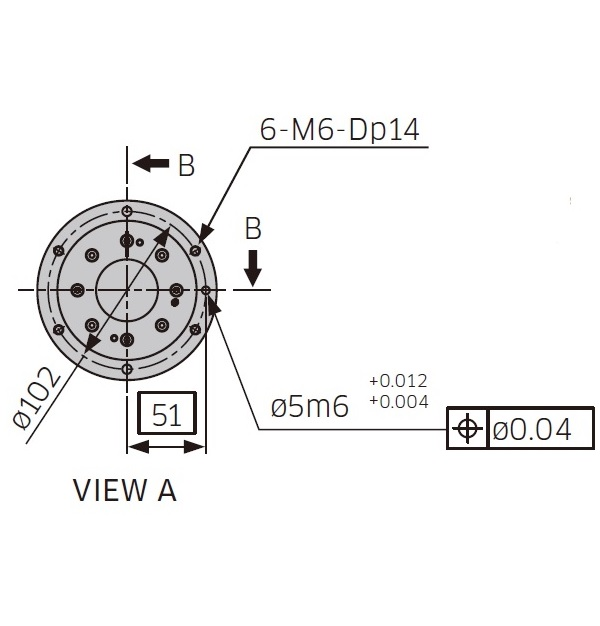
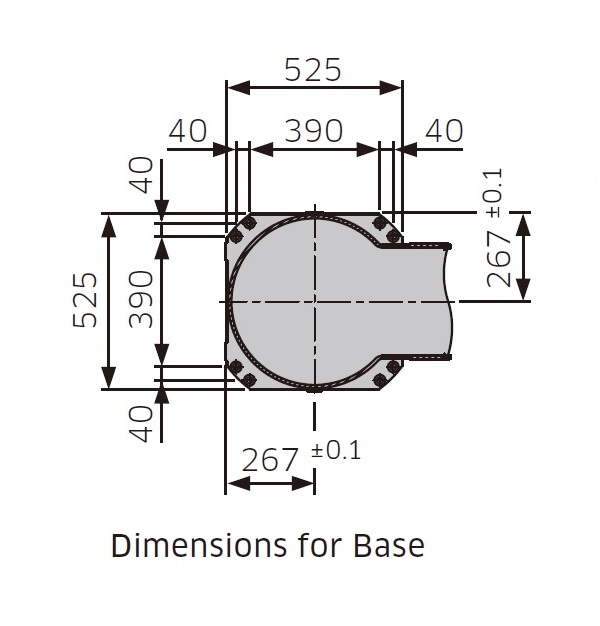
动作范围与尺寸
点击下面的图片来查看。图中所示尺寸单位为毫米(mm)。
KF193的规格
| KF193的规格 | |||
| 手臂类型 | 多关节型机器人 | ||
|---|---|---|---|
| 手腕类型 | 3Rø40✽1 | ||
| 自由度 (轴) | 6 | ||
| 负载能力 (kg) | 手腕:12 手臂:20 | ||
| 臂展 (mm)✽2 | 1,973 | ||
| 重复定位精度 (mm)✽3 | ±0.5 | ||
| 动作范围 (°) | 手臂旋转 (JT1) | ±150 | |
| 手臂前后 (JT2) | +110 - -60 | ||
| 手臂上下 (JT3) | +90 - -80 | ||
| 手腕旋转 (JT4) | ±720 | ||
| 手腕弯曲 (JT5) | ±720 | ||
| 手腕扭转 (JT6) | ±410 | ||
| 喷涂速度 (m/s) | 1.2 | ||
| 允许负载扭矩 (N•m) | 手腕旋转 (JT4) | 33.1 | |
| 手腕弯曲 (JT5) | 26.7 | ||
| 手腕扭转 (JT6) | 7.9 | ||
| 允许负载惯量 (kg•m2) | 手腕旋转 (JT4) | 1.27 | |
| 手腕弯曲 (JT5) |
0.82 |
||
| 手腕扭转 (JT6) | 0.10 | ||
| 重量 (kg) | 750 | ||
| 安装方式 | 地面, 壁挂 | ||
| 安装条件 | 环境温度 (°C) | 0 - 40 | |
| 相对湿度 (%) | 35 - 85 (无结露) | ||
| 所需电源 (kVA) | 5 | ||
| 防爆构造 | 美国 | - | |
| 加拿大 | - | ||
| 欧洲 | 内压防爆及本质安全防爆的复合型 (Ⅱ2G Expxib ⅡB T4 / Exib ⅡB T4) | ||
| 韩国 | 内压防爆及本质安全防爆的复合型 (Ⅱ2G Expxib ⅡB T4 / Exib ⅡB T4) | ||
| 中国 | 内压防爆及本质安全防爆的复合型 (Ⅱ2G Expxib ⅡB T4 / Exib ⅡB T4) | ||
| 日本・亚洲 | 内压防爆及本质安全防爆的复合型 (Expib ⅡB T4 / Exib ⅡB T4) | ||
| 控制柜 | 面向美国・加拿大 | - | |
| 面向欧洲 |
E45 |
||
| 面向日本亚洲 | E25 | ||
✽1: 可以内置线缆。
✽2: 6轴机器人的3R手腕构造的时候,指的是JT1中心到JT4与JT5的回转轴交点之间的距离。
✽3: 以ISO9283为基准。